iRAYPLE 自律走行搬送ロボット(AMR/AGF)
実際にロボットを
見て、触ってみたい方はこちら



※1 軽量可搬モデルを除く



段差10mm

溝20mm

傾斜3°
停止位置精度とメンテナンス性はトレードオフになりがちです。
このトレードオフを解消するために、iRAYPLEはハイブリッドナビゲーションという1つの解をご提供します。
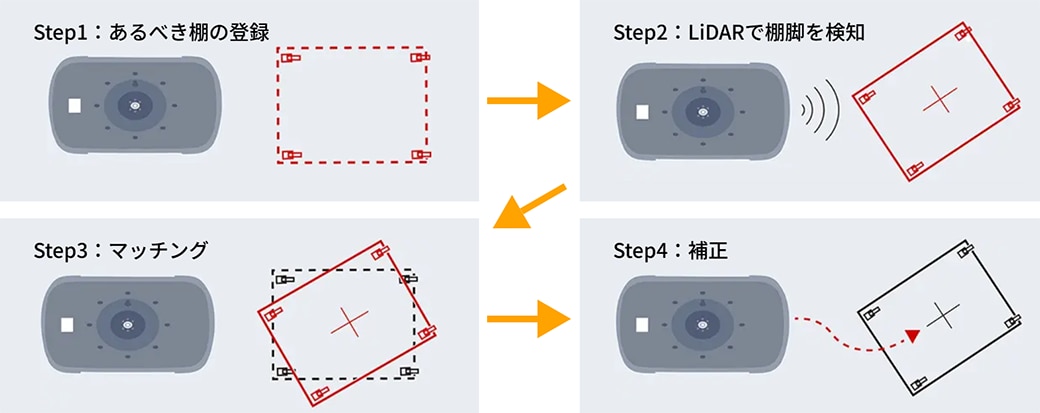
AMRに搭載しているLiDARセンサーとToFカメラにより、棚の位置ズレを検知し、潜り込む角度を自動調整ができます。作業員が台車を置き、AMRが搬送するアプリケーションで高い効果を発揮します。
調整可能な角度や距離など、ご不明点あればお気軽にお問い合わせください。
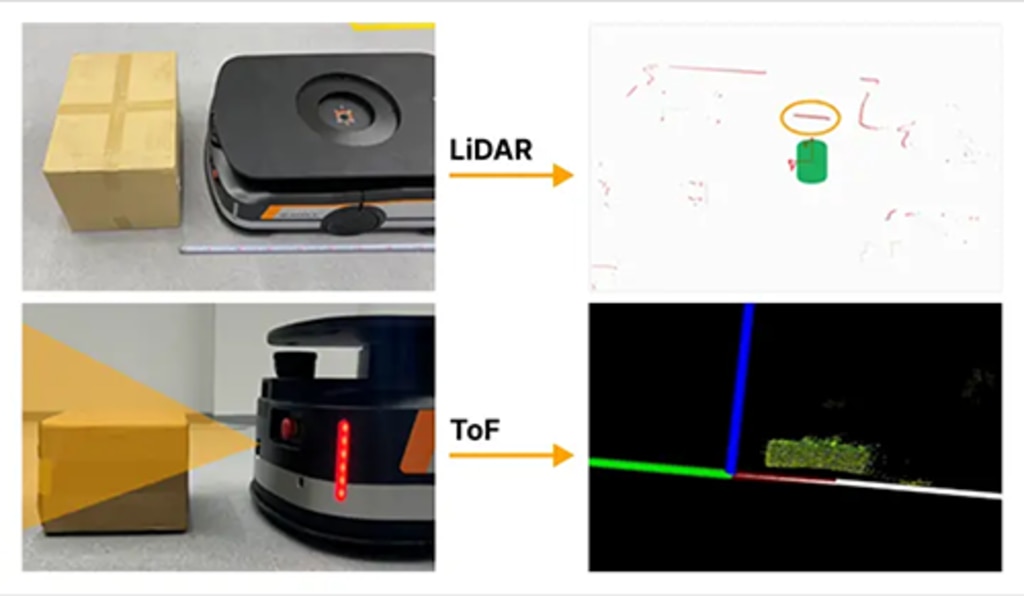
LiDARとToFの2段構造により、大小様々な障害物を検知可能です。完全無人エリアを作ることが難しい日本において、安全性の高い車両は非常に重要です。もちろん、前方・後方にも標準で搭載(※)しているため、効率的な向きで走行ができます。
※ 軽量可搬モデルを除く
障害物回避とリルートの両方をサポートしており、ルート毎に選択が可能です。
【リルート】
リルートは、あくまでも設計したルートの上で経路を再計算します。
障害物検知時は、障害物の前で一時停止した後、ルートを再計算してから走行をします。予測外の動作を防ぎたい場合には、リルートをお使いください。
【回避】
障害物回避は、障害物にぶつからない範囲で逃げるような挙動です。
障害物検知時に、障害物の幅を計算し、最短距離で回避することが可能です。
環境変化50%まで対応可能
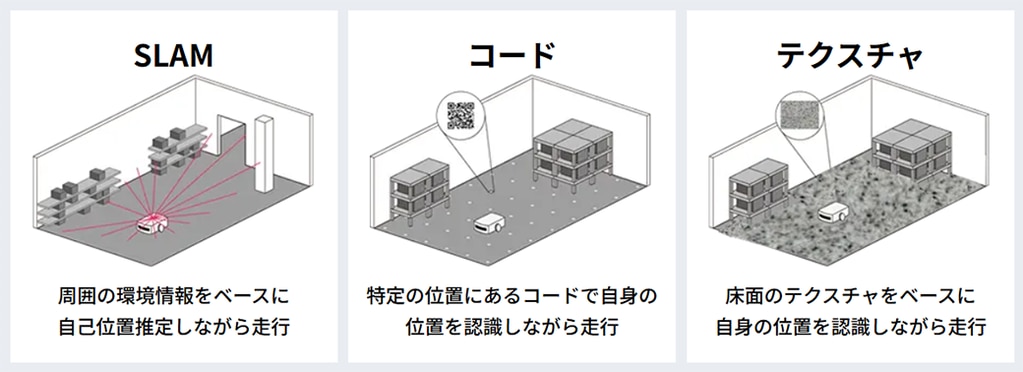
SLAMナビゲーションは周囲の壁情報を使用して自己位置を推定します。最初にマップを作成したタイミングと、50%の変化量までは許容します。それ未満であっても特徴的な場所が存在すれば自己位置を推定することも可能です。
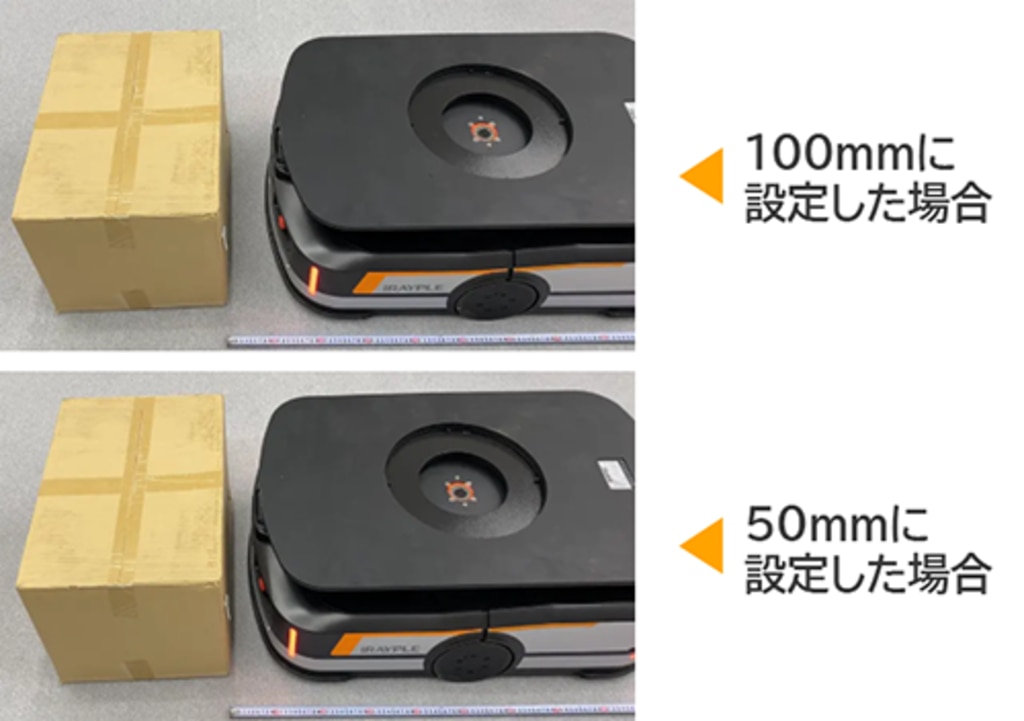
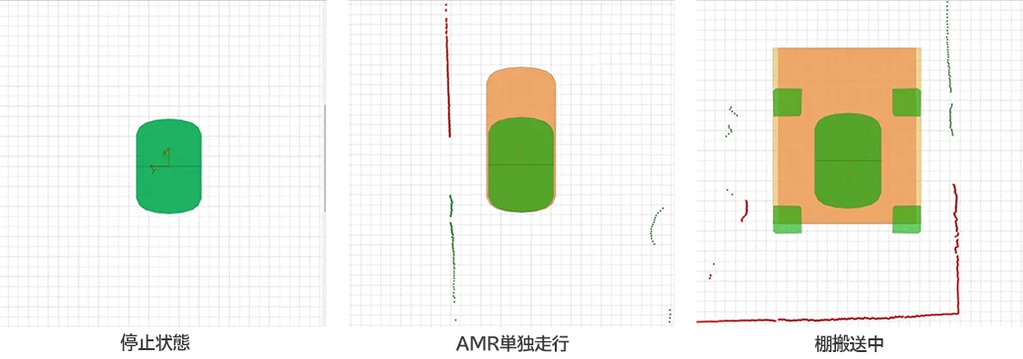
自身の状態(停止、移動)と搬送中の棚のサイズによって、自身の保護ゾーンを自動調整します。
AMRに搭載されたコードリーダにて棚裏のコードを読み取り、
データベースからサイズ情報を取得して、保護ゾーンの切り替えを行います。
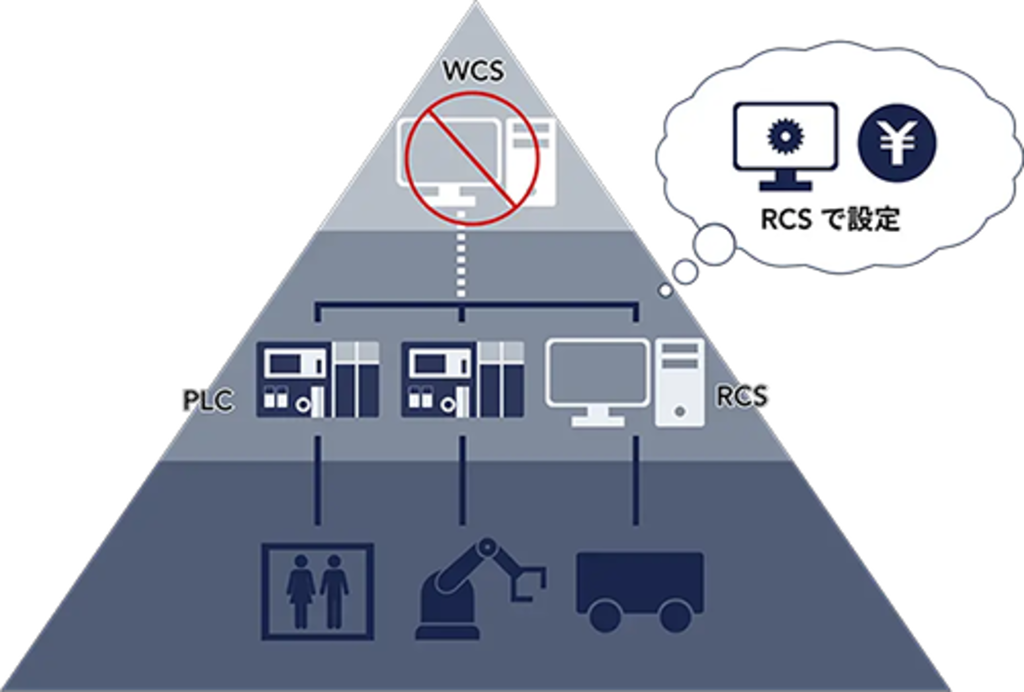
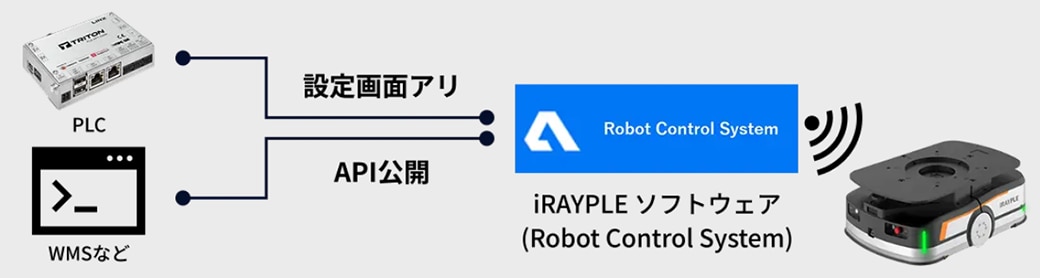
iRAYPLEはPLCとの通信インターフェースを持っています。例えば、工程間搬送のような上位システムを必要としないアプリケーションの場合、大幅なコストダウンが見込めます。
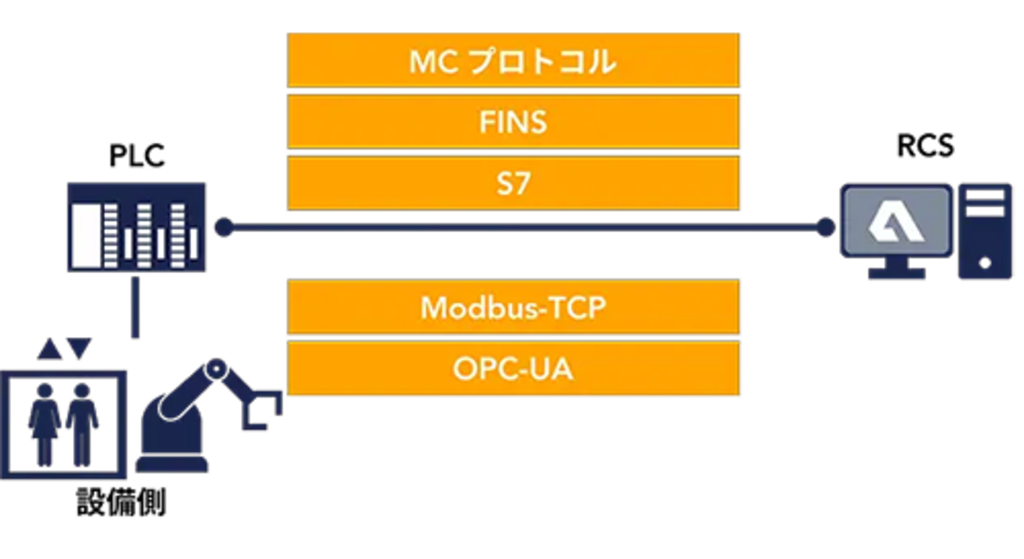
三菱電機製PLCと接続可能な「MCプロトコル」、オムロン製PLCと接続可能な「FINS」、シーメンス製PLCと接続可能な「S7」といった専用インターフェースに加え、汎用的な「Modbus-TCP」や「OPC UA」をそなえています。これにより、主要なPLCとはほぼ全て通信することが可能です。
PLC通信インターフェースによりエレベーター連携も実現
iRAYPLEは、ユーザ側でもカンタンにマップを編集できるソフトウェアを提供しています。
マップの編集、ナビゲーション方式、走行速度など、ルート単位で視覚的に直感的に操作可能です。
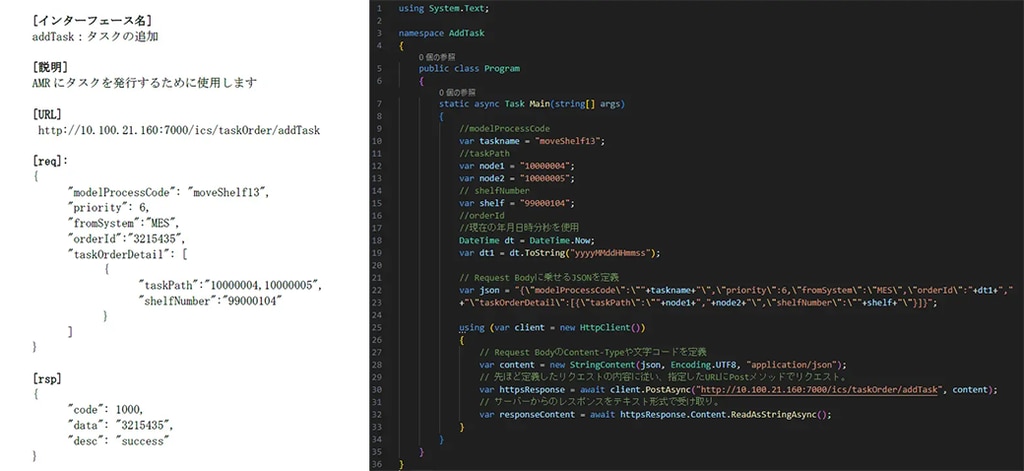
WCSなどの上位システムからAMRを呼び出す、タスクをキャンセルするなど、
様々な通信インターフェースを公開しています。
iRAYPLEをご採用いただければ、自社でのソフトウェア構築、
提携先での開発外注をスムーズに実施していただくことが可能です。
タスク発行の例


© 2014 FA Techno Corporation. All rights reserved.